
Laserové senzory CMOS s integrovaným zesilovačem
Řada LR-Z
Laserové senzory CMOS s integrovaným zesilovačem Řada LR-Z

Nový Standard!
Univerzální laserový senzor
Detekce pozice, kontrastu a průhlednosti.
- Malé tělo
- Montážní rozteč je 25,4 mm
- Funkce U.C.D.

Laserový senzor schopný detekovat cíle podle polohy a kontrastu (detekovatelná vzdálenost: až 500 mm).

Vlastnosti
Nejvyšší kapacita detekce ve své třídě

Unikátní funkce U.C.D. senzorů řady LR-Z Tato funkce zajišťuje stabilní detekci čirých, kovových či tmavých cílů. Senzory této řady slouží k detekci čistě na základě vzdálenosti bez ohledu na tvar, barvu a povrchovou úpravu cíle.
Odolnost a dlouhá životnost

Stupeň krytí IP68/69K znamená, že senzory řady LR-Z zvládnou i to nejnáročnější průmyslové prostředí. Tělo senzoru z nerezové oceli odolává stékání, stříkajícímu oleji i celé řadě korozivních látek. Díky svému robustnímu provedení vydrží i nárazy nebo přetažení.
Zjednodušená obsluha

Konstrukce senzorů řady LR-Z znamená především jednoduché nastavení a snadnou obsluhu. Kalibrace senzoru je jednoduchá a rychlá – stačí jednou stisknout tlačítko. Dobře viditelný indikátor a 7segmentový displej výrazně usnadňuje obsluhu senzoru.
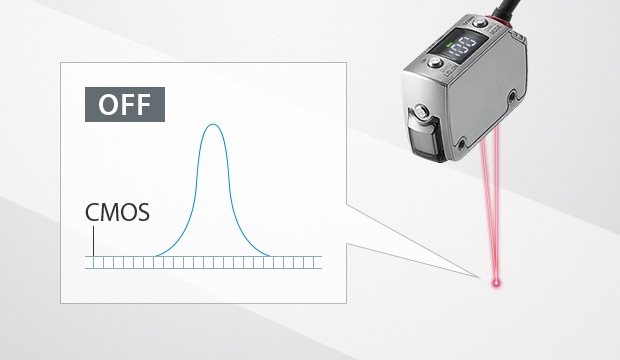
Nová funkce U.C.D Rozlišení cíle od pozadí pomocí vzdálenosti a přijímaného světla
Senzor nejprve zaznamená vzdálenost od pozadí a přijímané světlo, které použije jako referenci. Poté detekuje cíl snímáním rozdílu mezi vzdáleností nebo přijímaným světlem a registrovanou referencí v okamžiku, kdy cíl vstoupí do detekční oblasti. Díky pozadí je zajištěna stabilní detekce, i když cíl představuje objekt komplexního tvaru, změnil zabarvení a stav povrchu nebo jde o tenký objekt s malým výškovým rozdílem.
Bez Cíle
S Cílem
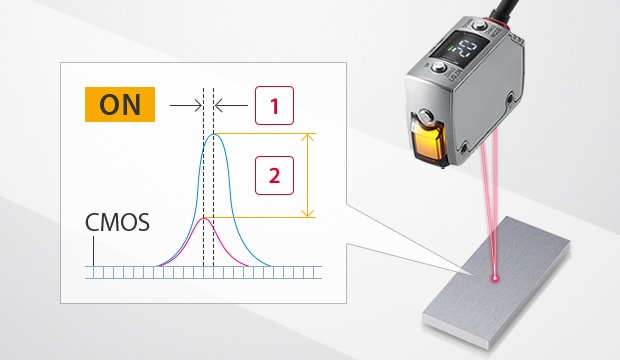
-
1Rozdíl ve vzdálenosti
-
2Rozdíl v přijatém světle
Průhledné Objekty
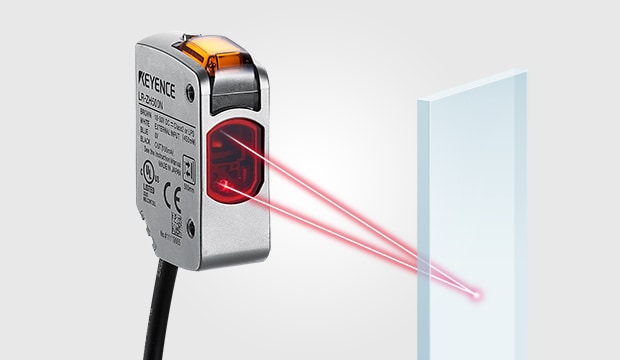
Funkce ladění pozadí umožňuje sledovat změny v přijímaném světle. Model LR-ZH dokáže detekovat průhledné objekty snímáním změn v přijímaném světle z registrovaného pozadí. Ač se jedná o typ modelu s nastavením vzdálenosti, jeho všestrannost mu v přítomnosti pozadí umožňuje i detekci průhledných objektů.