Wykrywanie górnej i dolnej części podnośnika nożycowego
-
Branża:
- Przemysł motoryzacyjny
-
Produkty:
- Czujniki
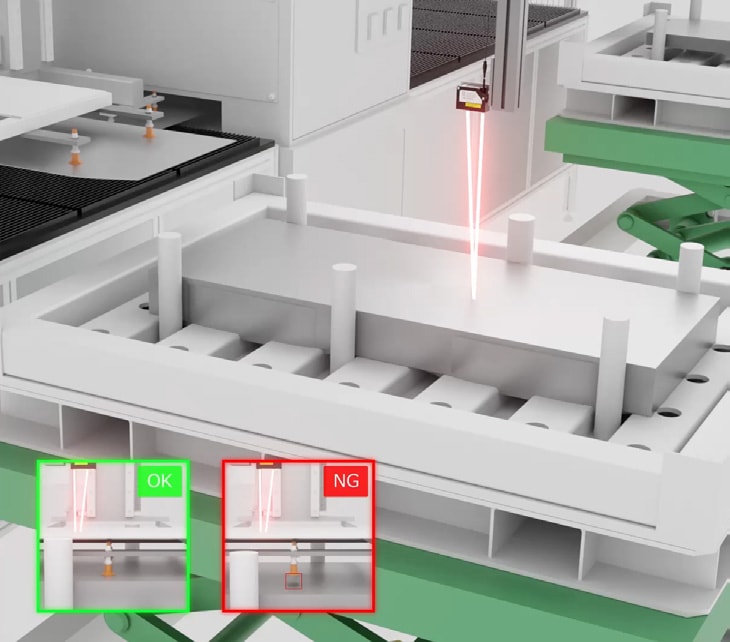
Położenie pobierania robota można dokładnie określić. Robot pobiera panele na stałej wysokości. Wysokość zmienia się w miarę podnoszenia paneli. Konieczne jest podniesienie i opuszczenie podnośnika nożycowego poprzez śledzenie wykrywanej wartości. Czujnik należy zamontować w dużej odległości, aby nie kolidował z maszynami do przeładunku materiałów. Rozdzielczość musi również wynosić 1 mm, więc wymagany jest czujnik typu IL Long Range. Informacje mogą być również wymieniane z maszynami przy użyciu komunikacji cyfrowej i wyjść analogowych.
