Aby bylo možné změřit objekt laserovým senzorem, musí být přijímač schopen přijmout světlo odražené od objektu. U měřících systémů, které využívají metodu triangulace, se v závislosti na stavu povrchu objektu senzorové hlavy instalují pod úhlem, aby mohly řádně přijmout odražené světlo.
A) Neprůhledné objekty
Objekt a senzorová hlava se instalují rovnoběžně.
Přijímač zachycuje část rozptýleného světla.
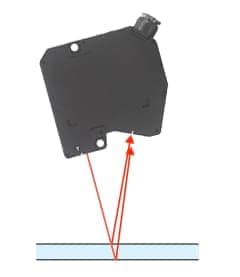
B) Průhledné objekty
Senzor je nainstalován tak, aby byl úhel dopadu světla stejný jako úhel odrazu.
Přijímač přijímá zrcadlový odraz světla.
Referenční vzdálenost
Referenční vzdálenost je výchozím nulovým bodem senzorových hlav. Obvykle je reprezentována vzdáleností od spodku senzorové hlavy ke středu měřícího rozsahu.
A
Referenční vzdálenost
Měřící rozsah
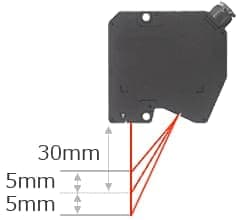
Měřící rozsah je rozsah, v němž může senzor provádět měření. Měřící rozsahy se obecně zapisují zápisem ±xx mm vůči referenční vzdálenosti.
[Příklad]
Referenční vzdálenost: 30 mm
Měřící rozsah: ±5 mm
Laserový senzor popsaný výše dokáže měřit objekty v následujícím rozsahu.
Světelný zdroj
U bezkontaktních měřících systémů vysílač osvětluje objekt a odražené světlo je zachyceno přijímačem. K osvětlení objektu lze použít nejrůznější zdroje světla, mezi které patří polovodičové lasery s červeným světlem, polovodičové lasery se zeleným světlem, bílé světlo, superluminiscenční diody (SLD) a zelené světelné diody LED. Typ zdroje světla je dán principem měřícího systému. Pomocí vhodných objektivů nebo osvětlených prvků zdroje světla lze dosáhnout vysoce přesného měření.
Průměr paprsku
U bezkontaktních měřících systémů se používají obecně dva typy bodů paprsku – eliptický a kruhový. Eliptické body slouží k průměrování výšek v oblasti a jsou méně náchylné na vliv drsnosti povrchu objektu. Se zvyšující se velikostí bodu jsou však méně vhodné k určování profilu tvarů nebo měření malých objektů. Oproti tomu kruhový bod je menší, a je tak efektivnější při provádění tohoto druhu kontrol.
Eliptický bod
Kruhový bod
Opakovatelnost
Opakovatelnost představuje celkový rozdíl mezi měřenými hodnotami na stejném místě objektu.
Linearita
Linearita je ukazatelem vlastnosti měřicího systému. Její hodnota představuje maximální hodnotu chyby mezi ideální hodnotou a skutečným výsledkem měření. Pokud se například objekt posune o 1 mm pomocí měřícího systému s linearitou ±5 µm, říkáme, že zobrazená hodnota může zahrnovat chybové rozpětí ±5 µm (např. 9,995 µm až 1,005 µm). Specifikace linearity se udávají jako ±○○ % z hodnoty celého rozsahu, kde „celý rozsah“ označuje měřící rozsah. Výpočet se provádí následujícím způsobem. Můžeme oprávněně tvrdit, že měřící systémy s menší linearitou jsou lepší.
Například v případě měřícího systému s linearitou 0,02% celého rozsahu a měřícím rozsahem ±3 mm (celý rozsah = 6 mm) bude linearita 0,02% × 6 mm = ±1,2 µm.
Graf linearity
X
Vzdálenost
Y
Elektrické napětí
A
Linearita
B
Skutečná hodnota
C
Ideální přímka
Teplotní charakteristika
Teplotní charakteristika představuje maximální hodnotu chyby měření, která vznikne, když se teplota senzorové hlavy změní o jeden stupeň. Uvnitř senzorové hlavy je objektiv a snímač CMOS a součásti k jejich upevnění. V důsledku změň teploty se tyto součásti roztahují a stahují, mění polohu obrazu na snímači CMOS a způsobují chyby. Teplotní charakteristika se udává jako ±○○ % celého rozsahu/°C, kde „celý rozsah“ představuje měřící rozsah. Výpočet se provádí následujícím způsobem. Můžeme oprávněně tvrdit, že měřící systémy s menší teplotní charakteristikou jsou lepší. Například v případě měřícího systému s teplotní charakteristikou 0,01% celého rozsahu/°C a měřícím rozsahem ±3 mm (celý rozsah = 6 mm) bude linearita 0,01% × 6 mm = ±0,6 µm.
Okolní světlo
Okolní světlo označuje maximální intenzitu osvětlení externího zdroje světla, při níž dokáže měřící systém měřit bez ovlivnění.
Okolní teplota
Okolní teplota označuje teplotu prostředí, při níž lze zaručit funkčnost měřícího systému.
Okolní vlhkost
Okolní vlhkost označuje vlhkost prostředí, při níž lze zaručit funkčnost měřícího systému.
Odolnost vůči vibracím
Odolnost vůči vibracím je ukazatel, který udává vliv vibrací na měřící systém. Zobrazené hodnoty označují provedené hodnocení. Například obecný popis „10 až 55 Hz, dvojitá amplituda 1,5 mm, vždy 2 hodiny ve směru každé z os X, Y a Z“ konkrétně znamená, že byla provedena následující zkouška. Vibrace prováděné po dobu 2 hodin s frekvencí 10 až 55 Hz a amplitudou ±0,75 mm ve směru osy X ⇓ Vibrace prováděné po dobu 2 hodin s frekvencí 10 až 55 Hz a amplitudou ±0,75 mm ve směru osy Y ⇓ Vibrace prováděné po dobu 2 hodin s frekvencí 10 až 55 Hz a amplitudou ±0,75 mm ve směru osy Z
Vzorkovací frekvence / rychlost vzorkování
Vzorkovací frekvence neboli rychlost vzorkování představuje počet datových bodů, které dokáže měřící systém změřit za sekundu. Měřící systém se vzorkovací frekvencí 100 Hz dokáže provést 100 měření za 1 sekundu. Měřící systémy s vyššími vzorkovacími frekvencemi, které měří ve výrobním procesu, dokážou měřit objekt přesněji a protože u nich lze provádět současně více procesů průměrování, jsou měření stabilní.
Vzor přijatého světla
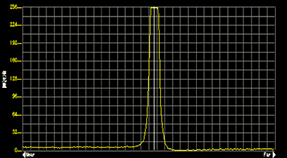
Vzor přijatého světla představuje stav světla přijatého osvětleným prvkem. Na svislé ose je intenzita světla a na vodorovné poloha osvětleného prvku. Kontrolou tvaru vzoru přijatého světla lze zjistit, zda se aktuální měření provádí správně.
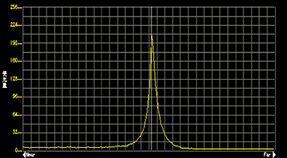
(1) Ideální vzor přijatého světla
Tento vzor přijatého světla umožňuje stabilní měření.
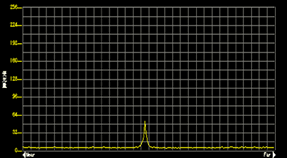
(2) Nízký vzor přijatého světla
Měření nelze provést, protože množství přijatého odraženého světla je nedostatečné.
(3) Příliš vysoký vzor přijatého světla
Odražené světlo je vysoce nasycené. V takových případech může docházet ke značným odchylkám změřených hodnot.
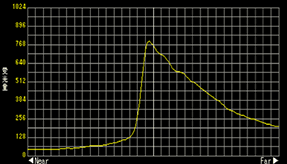
(4) Vzor přijatého světla není souměrný podle vodorovné osy
Při měření materiálů na bázi pryskyřic a podobných se laserový paprsek propadne do objektu a vzor přijatého světla se stane nesouměrným podle vodorovné osy. V takových případech se provádí posun měřených hodnot, aby se vyvážila míra propadu od skutečné hodnoty.
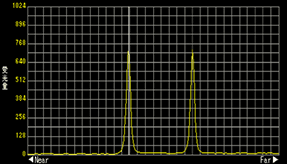
(5) Více vzorů přijatého světla
Při měření průhledných objektů, například skla, má vzor více než jeden vrchol. Při měření skla má vzor dva vrcholy – vrchol odražený od horního povrchu a vrchol odražený od dolního povrchu.
Optická osa, oblast optické osy
Osa procházející středem světla vyslaného z vysílače měřícího systému se nazývá optická osa. Graf oblasti optické osy znázorňuje cestu světla od vysílače k přijímači. Protože k objektu nebo přijímači nedosáhne žádné světlo, pokud do oblasti vstoupí součást nebo jiný předmět, není měření možné.
Graf oblasti optické osy
Napájecí napětí
Napájecí napětí je napětí nebytné k provozu přístroje. Pokud je udána specifikace 24 VDC ±10%, je požadován napájecí zdroj stejnosměrného napětí 24 V s kolísáním nepřesahujícím ±2,4 V.
Maximální spotřeba proudu
Maximální spotřeba proudu představuje velikost elektrického proudu spotřebovaného k provozu přístroje. Je nezbytné vybrat přístroj, jehož napájecí zdroj má větší kapacitu, než je maximální spotřeba proudu.